基于NI PXI平臺實現針對無框力矩電機、空心杯電機等多類型電機MCU的快速原型仿真和低成本硬件在環測試

2025-09-03
NI主控、電機與機械部件核心測試方案拆解
主控系統是機器人的大腦,負責其智能與決策,其電機提供運動能力的強大肌肉,而其復雜的機械部件則構成了賦予其結構的堅韌骨骼。確保這套“大腦、肌肉與骨骼”系統的安全性、可靠性與最佳性能是重中之重。NI提供靈活、可擴展且開放的解決方案,全面賦能機器人主控、電機與機械部件的測試。
無框力矩電機與空心杯電機是人形機器人中關鍵的執行部件,分別應用于大關節的直接驅動(如肩、肘、髖等)和精細部位的動作控制(如手指、手腕、頭部等)。
前者具有高扭矩和零背隙優勢,適用于動態運動和平衡控制,后者則以體積小、響應快的特點,滿足高精度、輕量化的控制需求。對這類電機MCU進行硬件在環(HIL)測試至關重要,它可以在不依賴真實電機的前提下,仿真電機動力學響應,驗證控制算法的穩定性與魯棒性,確保在異常工況下依然安全可靠運行。
用戶反饋仿真電機時,市面上各類專有電機模型仿真軟件許可證昂貴,且不一定適用。因此,許多客戶會選擇使用Simulink進行自定義特殊模型仿真。

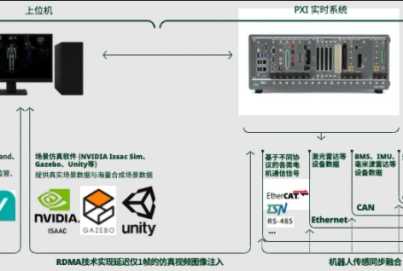
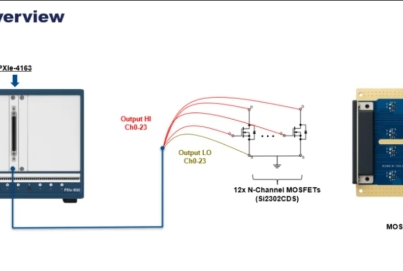
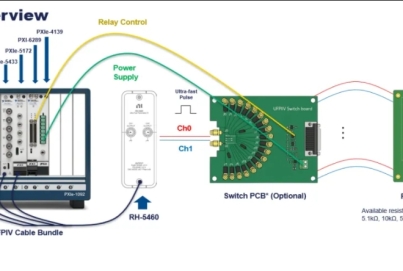
圖1:人形機器人電機快速原型仿真系統與電機MCU HIL測試系統架構
NI的電機MCU HIL測試系統允許用戶通過VeriStand將Simulink、C/C++、LabVIEW等不同工具開發的電機模型部署在PXI系統上,無需額外采購昂貴的電機仿真軟件或另搭平臺,大大節省成本和加速驗證。
用戶如需進行快速原型仿真,還可選擇通過 FPGA 將 MCU 算法部署在 PXI 實時系統中。通過靈活的配置,用戶可實現真實MCU控制真實電機,真實MCU控制仿真電機(如Simulink電機模型),仿真MCU控制真實電機,仿真MCU控制仿真電機四種測試模式。
另外,此架構也支持域級多電機的聯調,人形機器人各部件和系統間的通信大多采用EtherCAT或Ethernet協議,主控板作為主站與各電機MCU從站通信,用戶可以在一臺NI PXI系統上仿真主站信號,而被測件從站可根據測試需求配置單個電機MCU或域級多個電機MCU。這樣的測試配置方式下,用戶可在同一平臺下進行不同項目的測試。
隨著機器人技術的不斷發展,對測試的要求也必會日益提升。只有通過完善而高效的測試體系,才能確保機器人在復雜多變的應用場景中始終保持卓越表現。借助NI 的創新測試平臺,企業不僅能夠加速產品迭代,還能在安全性與可靠性上贏得更大優勢,為人性機器人行業的未來發展奠定堅實基礎。




最新資訊